

OTT: OTTOTTO
- Oops Robot -
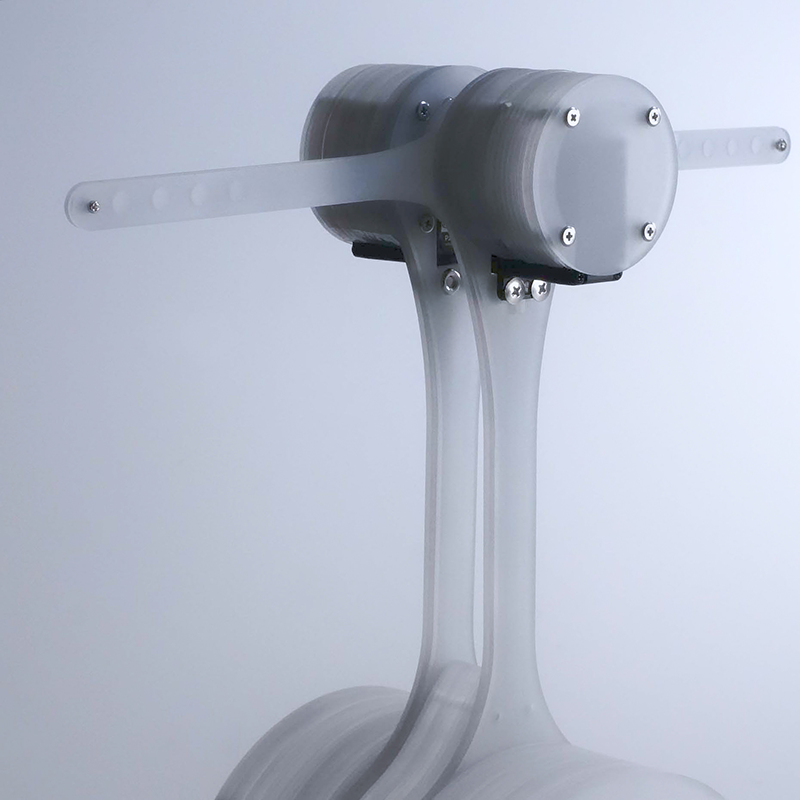
生物は安定した状態となるよう重力などの物理法則の上で常に均衡を保つようにしており、例えばひとたび不安定な姿勢になると、様々な反応や動作を即座に行うことで安定した姿勢に戻ろうとします。この作品では、こうした安定と不安定な姿勢を行き来する際の反応・動作の中から生命感や愛おしさを感じるふるまいを抽出し、人工物に適用しました。ふるまいにより生まれる、生き物らしさにご注目ください。
制作:金山正貴、宗像佑弥 ディレクション:山中俊治
2021 (C)Yamanaka Laboratory, Institute of Industrial Science,
the University of Tokyo
the University of Tokyo
OTT: OTTOTTO
- Oops Robot -
生物は安定した状態となるよう重力などの物理法則の上で常に均衡を保つようにしており、例えばひとたび不安定な姿勢になると、様々な反応や動作を即座に行うことで安定した姿勢に戻ろうとします。この作品では、こうした安定と不安定な姿勢を行き来する際の反応・動作の中から生命感や愛おしさを感じるふるまいを抽出し、人工物に適用しました。ふるまいにより生まれる、生き物らしさにご注目ください。
制作:金山正貴、宗像佑弥
ディレクション:山中俊治

考察と発想
研究を進めるにあたり不安定なモノについて考察したことや、実現にあたり描いたアイデアスケッチです。